


Research
My primary research interests are automated and intelligent robotic systems for logistics, which involve Machine learning, autonomous robotics, indoor wireless localization, and Radio-Frequency Identification (RFID) applications. Additionally, he is also interested in ubiquitous sensing and IoT, especially in investigating RFID technology to improve our daily lives and industries.
When RFID and AI meets for Occluded Body Skeletal Posture Capture in Health Care
This project aims to create and evaluate a low-cost, unobtrusive, privacy-protected, and robust posture capture system for healthcare and home environments, especially for non-visible scenarios (e.g., clothing and/or bedding occlusions). With passive Radio-Frequency Identification (RFID) tags fabricated into fitness clothing, wireless signals of RFID can be captured to detect posture and motion using an elaborated AI framework. This proposed system can be used in a healthcare facility or home environment for monitoring persons in need of preventative care, such as elders at high risk of falling, detecting abnormal body movements, and enhancing training and evaluation processes in rehabilitation setting.
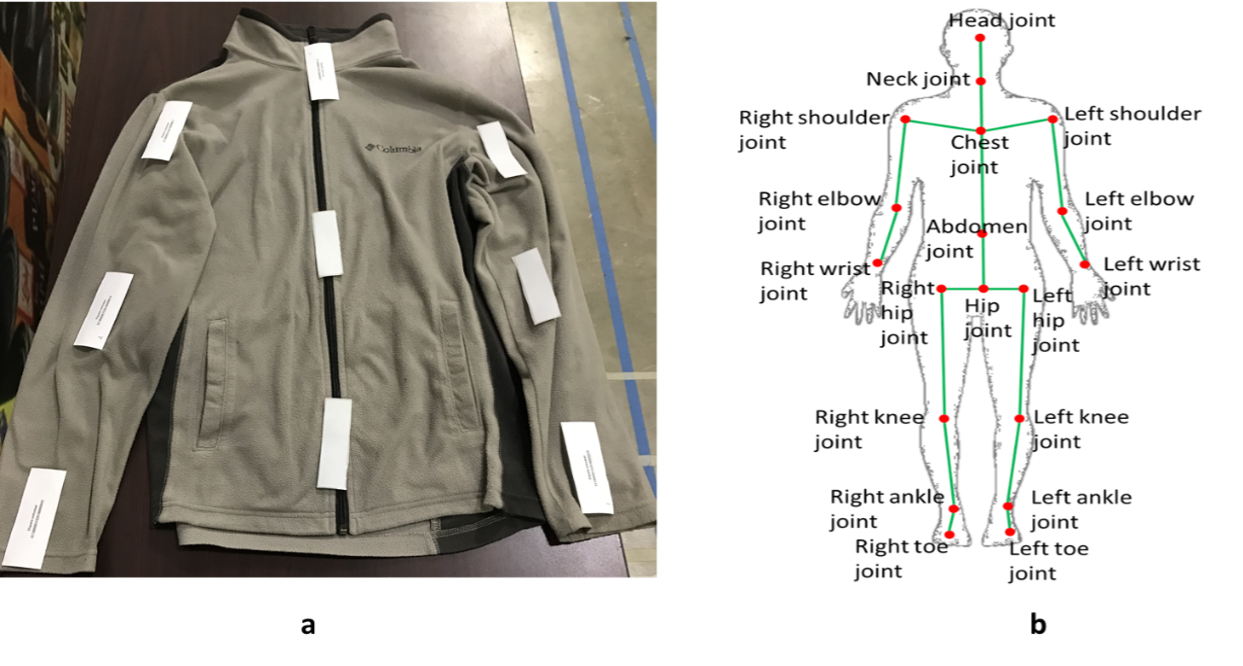
Figure 1. (a) An example of where tags would be fabricated in cloth on the upper body, and (b) the representative joints used to estimate body posture.
More details of this project at https://www.eng.auburn.edu/~szm0001/proj_CCSS23.html
We acknowledge the generous support from our sponsor
Motion Planning for Long-Horizon Robotic Tasks
It is an extreme challenge to develop a generalized approach to handle a Long-horizon task that requires hundreds if not thousands of steps for a robot to reach the target. Figure 1 depicts a simple robotic scenario to illustrate this challenge: a) the robot at state St, while two potential paths 2 and 3 are available; (b) if it has moved from path 1 or 3 to state St, the next actions lead to path 2 is a better choice; (c) if it has moved from path 2 to state St, the next actions lead to path 3 is a better choice. Note that the completion state St, is hidden from the root; Instead, it can only partially perceive St with limited historical data by built-in sensors, making it incapable of reasoning the covered paths.
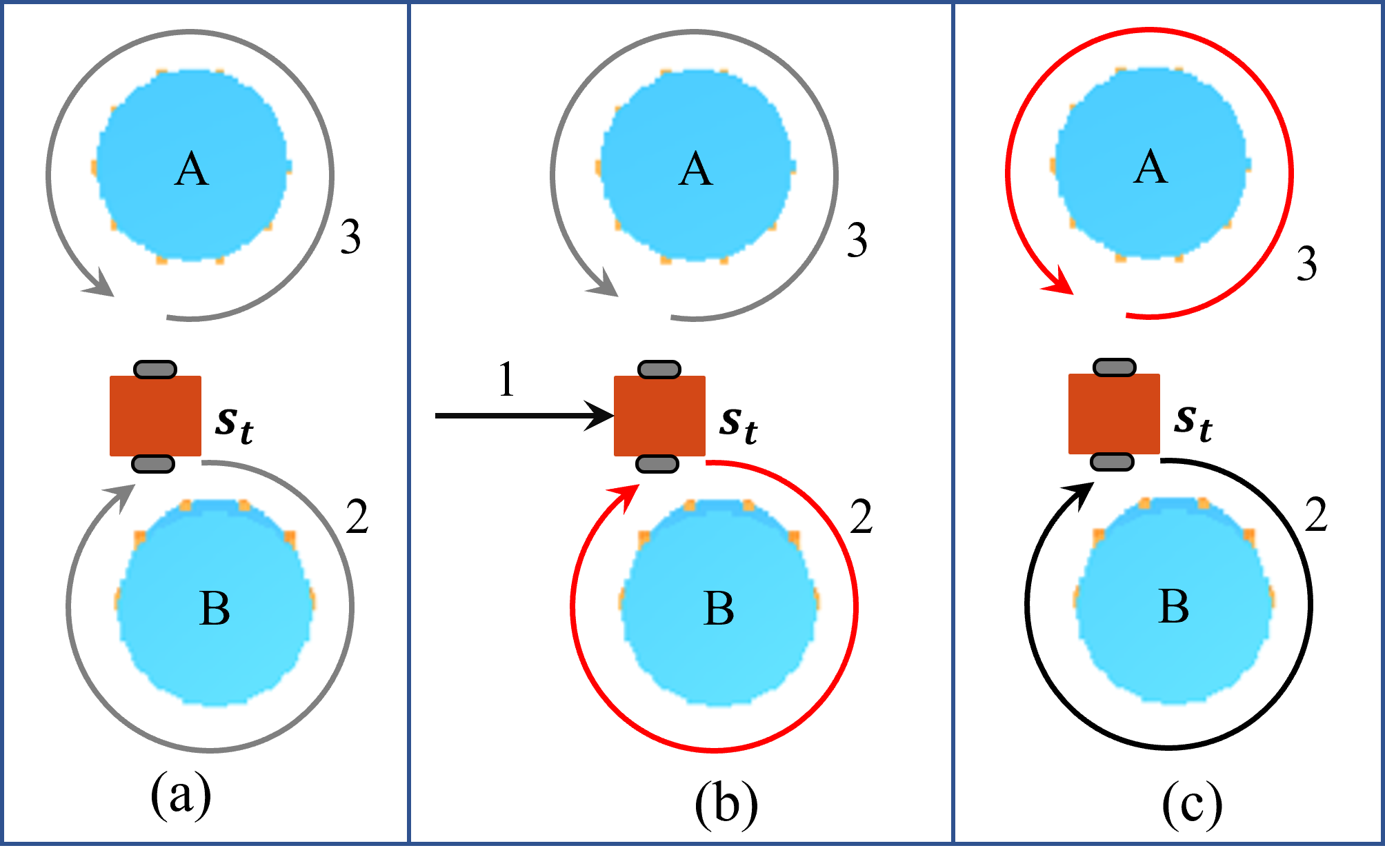
In this project, we investigate Deep Reinforcement Learning(DRL), Imitation Learning(IL), and Recurrent Neural networks (RNN) to overcome this gap. The central hypothesis in this work: 1). The RNN could enable the robot with a long-term memory that helps to build a more completed state St; 2). The IL module provides a powerful tool to train the robot by demonstration data that provides a seed strategy; 3). The DRL will optimize the learned seed strategy by interacting with the environments.
Outcomes of this project:
1. Yu, Z., Zhang, J., Mao, S., Periaswamy, S.C. and Patton, J., 2022. Multi-State-Space Reasoning Reinforcement Learning for Long-Horizon RFID-Based Robotic Searching and Planning Tasks. Journal of Communications and Information Networks, 7(3), pp.239-251.
2. Yu, Z., Zhang, J., Mao, S., Periaswamy, S.C. and Patton, J., 2022, January. RIRL: A Recurrent Imitation and Reinforcement Learning Method for Long-Horizon Robotic Tasks. In 2022 IEEE 19th Annual Consumer Communications & Networking Conference (CCNC) (pp. 230-235). IEEE.
3. Zhang, J., Yu, Z., Mao, S., Periaswamy, S.C., Patton, J. and Xia, X., 2020. IADRL: Imitation augmented deep reinforcement learning enabled UGV-UAV coalition for tasking in complex environments. IEEE Access, 8, pp.102335-102347.
Localize the RFID tags
Radio-frequency identification (RFID) is an automatic identification technology widely used in various applications, including supply chain management, inventory tracking, access control, toll collection, and animal management. An RFID tag is battery-free, low cost, soft to the touch, and paper-thin, making it can be a perfect platform for ubiquitous sensing of many IoT applications. However, the significant challenges also derive from the nature of the RFID technology: the battery-free tags' observations tend to be distorted by various noises (e.g., the noises from the environment, its antennas, other RFID tags, etc.) and suffer more from missing data.
In this project, we investigate and characterize the RFID technology and combining with advanced Deep Learning methods to deploy it for more widely IoT systems, such as indoor localization, pose tracking, and temperature monitoring.
Outcomes from this project:
1. Wang, X., Zhang, J., Yu, Z., Mao, S., Periaswamy, S.C. and Patton, J., 2019. On remote temperature sensing using commercial UHF RFID tags. IEEE Internet of Things Journal, 6(6), pp.10715-10727.
2. Zhang, J., Wang, X., Yu, Z., Lyu, Y., Mao, S., Periaswamy, S.C., Patton, J. and Wang, X., 2019. Robust RFID based 6-DoF localization for unmanned aerial vehicles. IEEE access, 7, pp.77348-77361.
3. Wang, X., Zhang, J., Mao, S., Periaswamy, S.C. and Patton, J., 2021, July. MulTLoc: RF Hologram Tensor Filtering and Upscaling for Locating Multiple RFID Tags. In 2021 International Conference on Computer Communications and Networks (ICCCN) (pp. 1-9). IEEE.




