


Research
Post-Disaster Reconnaissance
Our research focuses on advancing post-disaster reconnaissance and emergency response through a holistic and multidisciplinary approach. We aim to enhance the efficiency and effectiveness of disaster management by integrating cutting-edge technologies, such as drones, ground-penetrating radar, augmented reality, and artificial intelligence, to provide comprehensive situational awareness and support for search and rescue operations. We are committed to developing intelligent systems and robotic platforms that can autonomously assess and report on the structural integrity of buildings, identify potential hazards, and locate survivors in disaster-stricken areas. These technologies are designed to work in tandem with human responders, ensuring that they have the best possible information and tools to navigate complex environments and make informed decisions.
Our research also emphasizes the importance of predictive modeling and simulation to prepare for and mitigate the impacts of disasters. By leveraging advanced algorithms and machine learning, we aim to create realistic scenarios that help train first responders and improve their readiness for real-world situations. In addition to immediate response efforts, our work extends to enhancing long-term resilience and recovery strategies. We strive to integrate the lessons learned from each disaster into future preparedness plans, ensuring that communities are better equipped to withstand and recover from catastrophic events. Our ultimate goal is to save lives, reduce the impact of disasters, and build safer, more resilient communities through the continuous advancement of disaster reconnaissance and response technologies.
References
- Hu, D., Li, S., Du, J., & Cai, J. (2023). Automating building damage reconnaissance to optimize drone mission planning for disaster response. Journal of Computing in Civil Engineering, 37(3), 04023006.
- Hu, D., Chen, L., Du, J., Cai, J., & Li, S. (2022). Seeing through disaster rubble in 3D with ground-penetrating radar and interactive augmented reality for urban search and rescue. Journal of Computing in Civil Engineering, 36(5), 04022021.
- Hu, D., Chen, J., & Li, S. (2022). Reconstructing unseen spaces in collapsed structures for search and rescue via deep learning based radargram inversion. Automation in Construction, 140, 104380.
- Hu, D., Li, S., Chen, J., & Kamat, V. R. (2019). Detecting, locating, and characterizing voids in disaster rubble for search and rescue. Advanced Engineering Informatics, 42, 100974.
Robotic Solutions for Building Facility Management
Digital twin solutions and service robots are set to transform future facility management by automating laborious tasks and optimizing services. In smart hospitals, robots handle cleaning, disinfection, and patient care, while in smart warehouses and factories, they manage logistics and dexterous operations. The Internet of Things (IoT) in these smart facilities enables continuous monitoring and analytics. Integrating these technologies can significantly enhance operational efficiency and service quality across various types of facilities.
References
- Hu, D., Li, S., & Wang, M. (2023). Object detection in hospital facilities: A comprehensive dataset and performance evaluation. Engineering Applications of Artificial Intelligence, 123, 106223.
- Hu, D., & Li, S. (2022). Recognizing object surface materials to adapt robotic disinfection in infrastructure facilities. Computer‐Aided Civil and Infrastructure Engineering, 37(12), 1521-1546.
- Hu, D., Zhong, H., Li, S., Tan, J., & He, Q. (2020). Segmenting areas of potential contamination for adaptive robotic disinfection in built environments. Building and environment, 184, 107226.
Subsurface Mapping
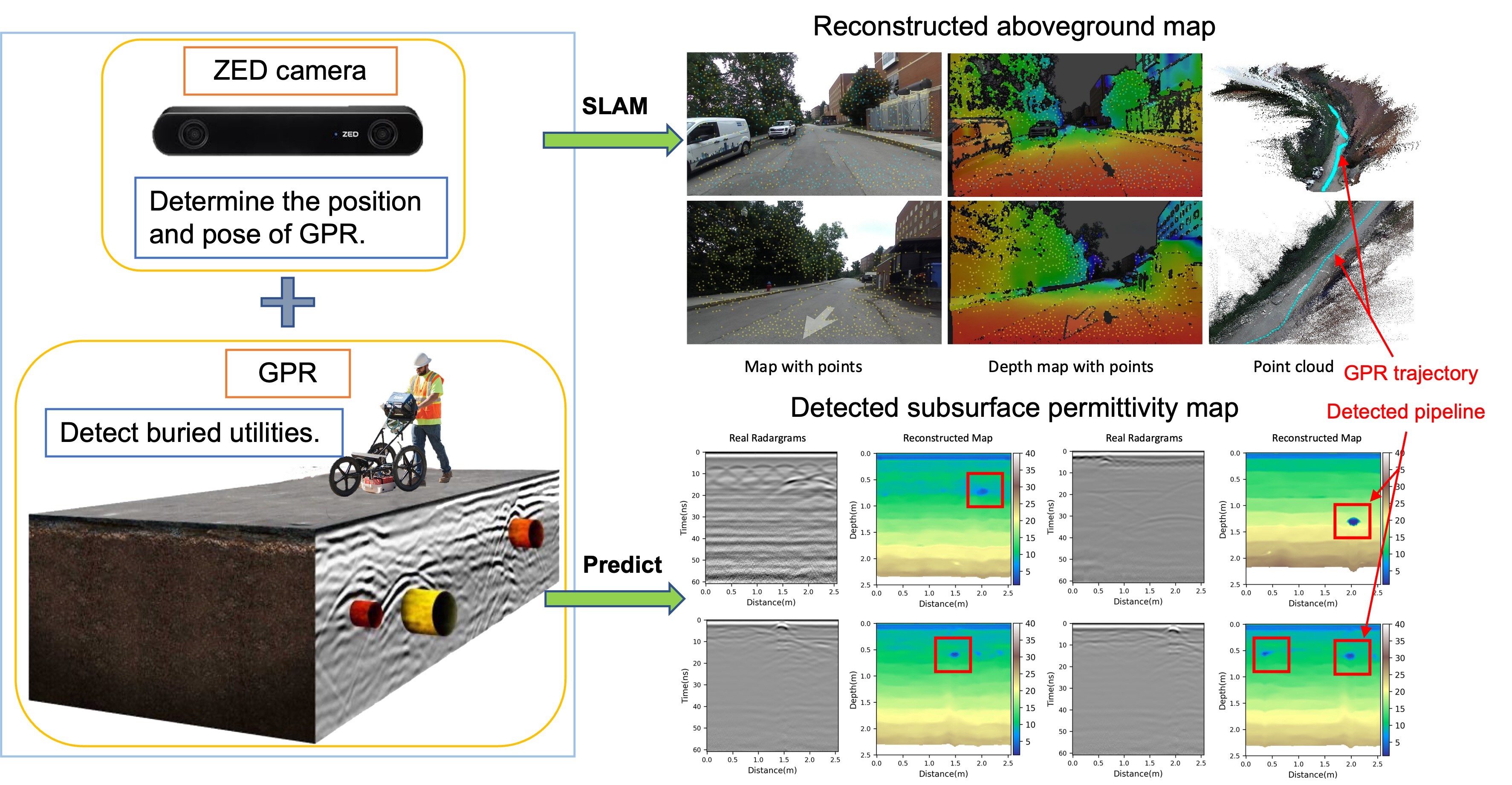
Subsurface mapping using ground-penetrating radar (GPR) is a vital technique in civil engineering for visualizing and understanding what lies beneath the surface. GPR employs electromagnetic waves to detect and map subsurface features, providing detailed images and data essential for various civil engineering applications. This technology helps identify voids, buried utilities, underground structures, and potential hazards, enabling informed decision-making and enhancing safety. By leveraging GPR, civil engineers can reduce risks and optimize the planning and execution of construction and infrastructure projects.
References
- Wang, M., Hu, D., Chen, J., & Li, S. (2023). Underground infrastructure detection and localization using deep learning enabled radargram inversion and vision based mapping. Automation in Construction, 154, 105004.
- Wang, M., Hu, D., Li, S., & Cai, J. (2022, December). Urban subsurface mapping via deep learning based GPR data inversion. In 2022 Winter Simulation Conference (WSC) (pp. 2440-2450). IEEE.
- Hu, D., Li, S., & Cai, J. (2021). A machine learning-based framework for automatic bridge deck condition assessment using ground penetrating radar. In Computing in Civil Engineering 2021 (pp. 74-82).
- Hu, D., Hou, F., Blakely, J., & Li, S. (2020, March). Augmented reality based visualization for concrete bridge deck deterioration characterized by ground penetrating radar. In Construction Research Congress 2020 (pp. 1156-1164). Reston, VA: American Society of Civil Engineers.




