


Research | ASCI Lab
Research Topics
- Transparent Omnidirectional Locomotion Compensator or Walking Drosophila
- Magnetic Soft Millirobots
- Biomimetic Motion of the Hexapod Robot
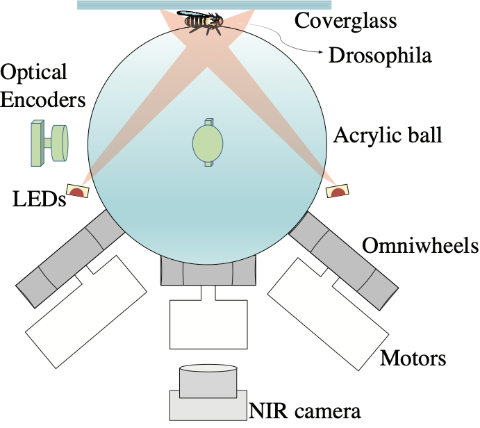
Transparent Omnidirectional Locomotion Compensator or Walking Drosophila
- Freely Walking Insect Tracking System (e.g., fruit fly, ants, etc.)
- Ideal for Insect Behavior Studies
- No motion restriction / tethering
- Extendable for Internal Organ Imaging such as Brain / Heart
Walking Fruit Fly (Tracking - PID control)
Walking Ant (MPC control w/ Prediction)
Magnetic Soft Millirobots
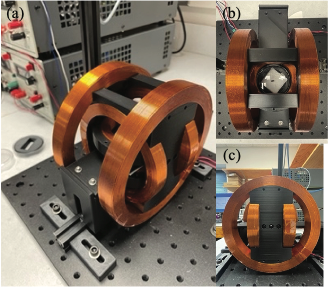
- Polymer-based flexible swimming robot
- Neodymium particles embedded
- Real-time Control of 3D electromagnets
- Various locomotions (rolling, stick-slip motion, corkscrew swimming motions)
- Possible to use as a counter part of a live larval fish
Corkscrew Swimming (underwater)
Stick-Slip motion (on the ground in the water)
Swimming on the water surface
Feedback Control
Feedback Control - Reverse Parking of Millirobot.
Biomimetic Motion of the Hexapod Robot
Development by Students (Kalev Martinson, William Marks, Erick Yu) supported by 2022-23 First-Year Scholar Program.




