Projects
Peer-to-Peer Framework for Real-Time Communication of Low-Penetration Connected Automated Vehicles
Cooperative control of connected automated vehicles (CAVs) mixed with human-driven vehicles (HDVs) in traffic offers significant potential to enhance mobility and reduce congestion in urban networks. However, the successful realization of cooperative control of low-penetration CAVs in practice relies on secure, robust, and latency-bounded communication between CAV agents for real-time information exchange. Traditional centralized communication frameworks rely on cloud-based servers and roadside infrastructure but face limitations in flexibility, scalability, and resilience due to their dependence on consistent infrastructure availability and stable connectivity. This research aims to develop a hybrid peer-to-peer communication framework with built-in cloud integration, edge-level intelligence, and lightweight, privacy-preserving, and resilient protocols for secure, scalable, and real-time decentralized information exchange among low-penetration CAVs in urban traffic environments.

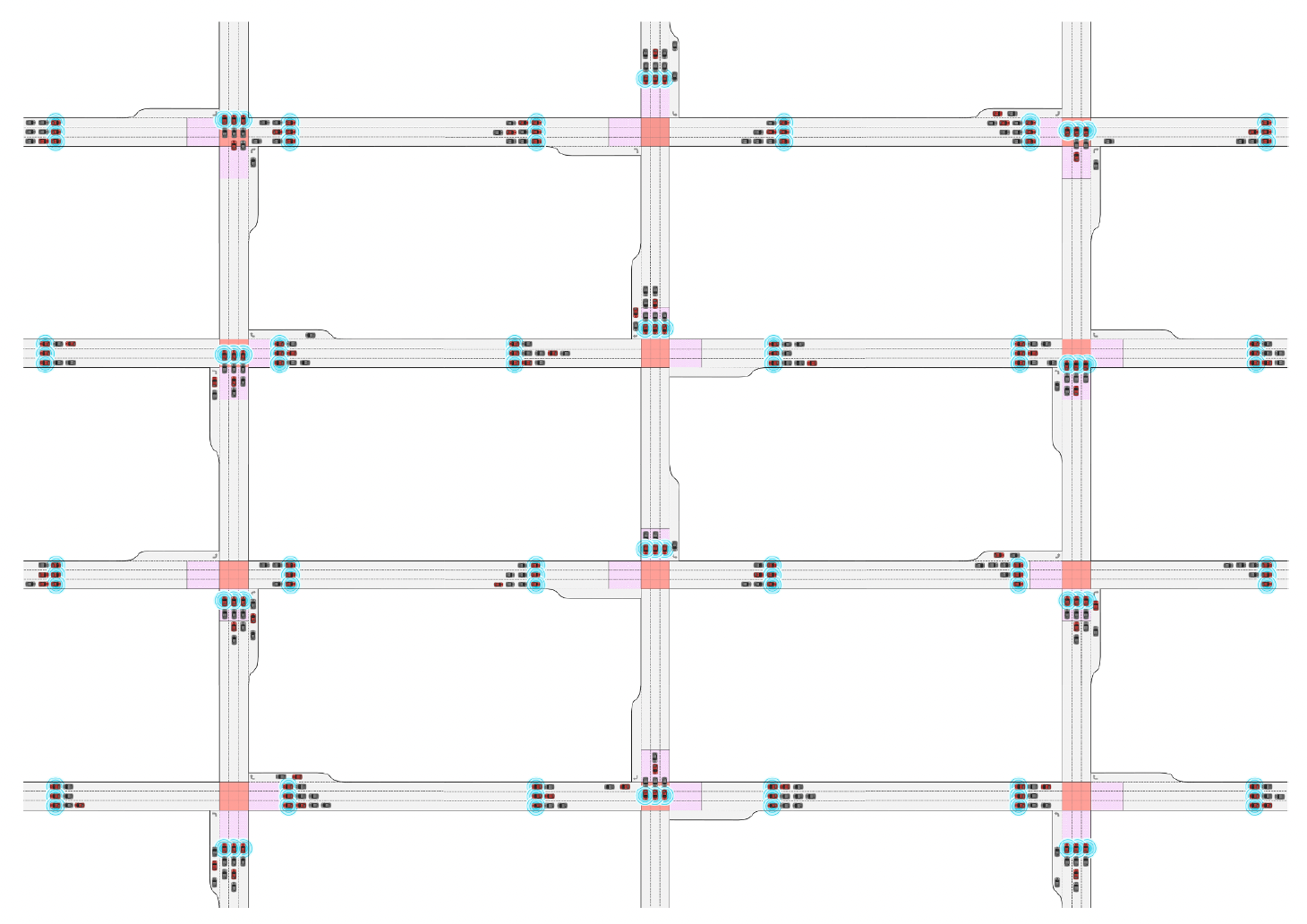
Machine Learning for Simulating Real-Time Traffic and Cooperative Signal Control in Urban Networks
Cooperative traffic control enables real-time coordination of signal settings for enhanced operation of traffic at large scales in urban networks, particularly during special events and emergency incidents. However, effective implementation of cooperative traffic control requires real-time prediction of traffic evolution for dynamic signal optimization. While traffic simulation models traditionally serve as robust platforms for dynamic traffic predictions, the computational intensity of simulation models limits their application as base models for real-time signal optimization. This research aims to develop a machine learning alternative to conventional traffic simulation approaches to facilitate real-time traffic prediction for dynamic signal optimization at large scales in urban regions.
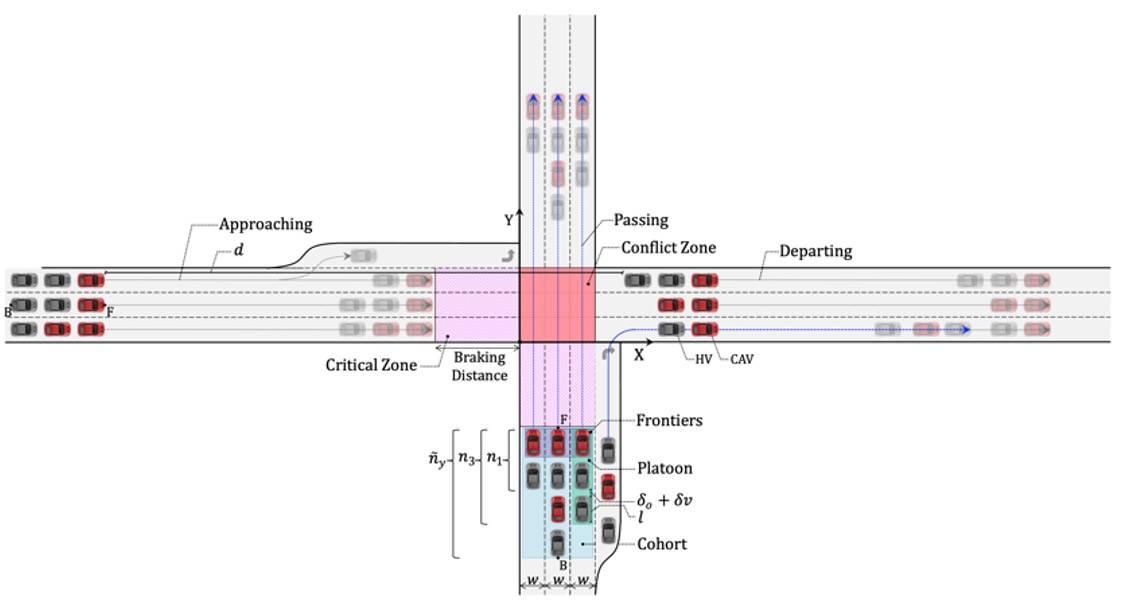
Connected-Automated Vehicles Orchestrating Human-Driven Vehicles in Urban Networks
Cooperative traffic control is a progressive alternative to conventional traffic signalization in connected environments. This research exploits the untapped potential of Connected Automated Vehicles (CAVs) to regulate mixed traffic consisting of CAVs and human-driven vehicles (HVs) to enhance traffic operations in urban networks. The integration of artificial intelligence and wireless communication technologies in CAVs enables coordinating the movement of HVs approaching intersections in conflicting directions to pass through without interruption safely. This research develops a cooperative control mechanism for coordinating the movement of HV platoons led by CAVs at intersections to minimize traffic congestion, energy consumption, and the emission of air pollutants in signal-free urban networks.
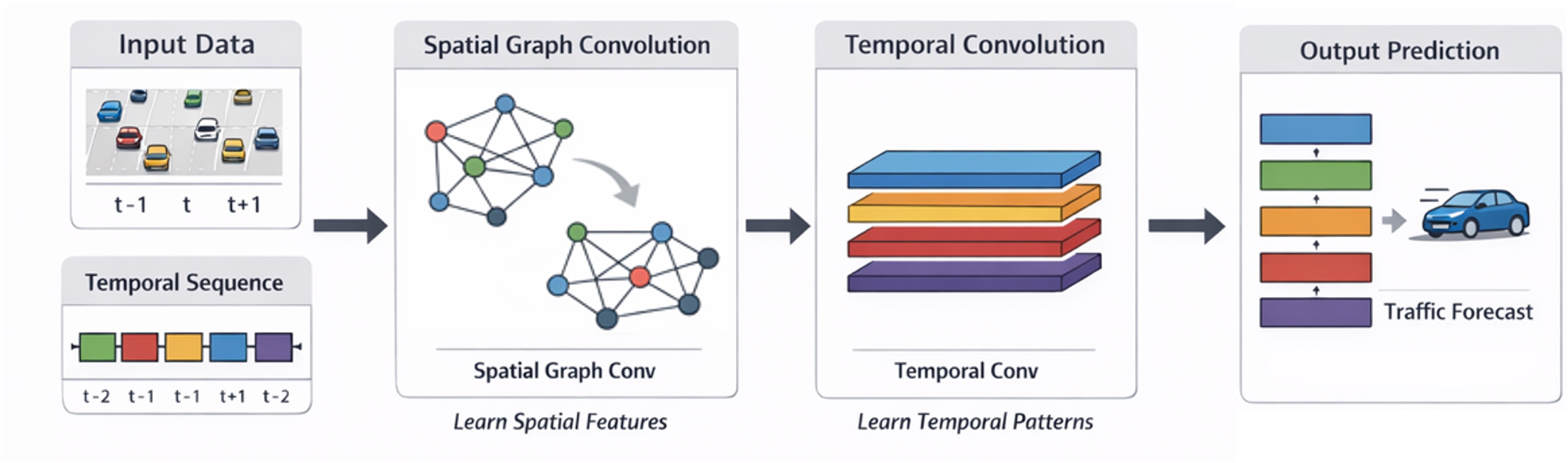
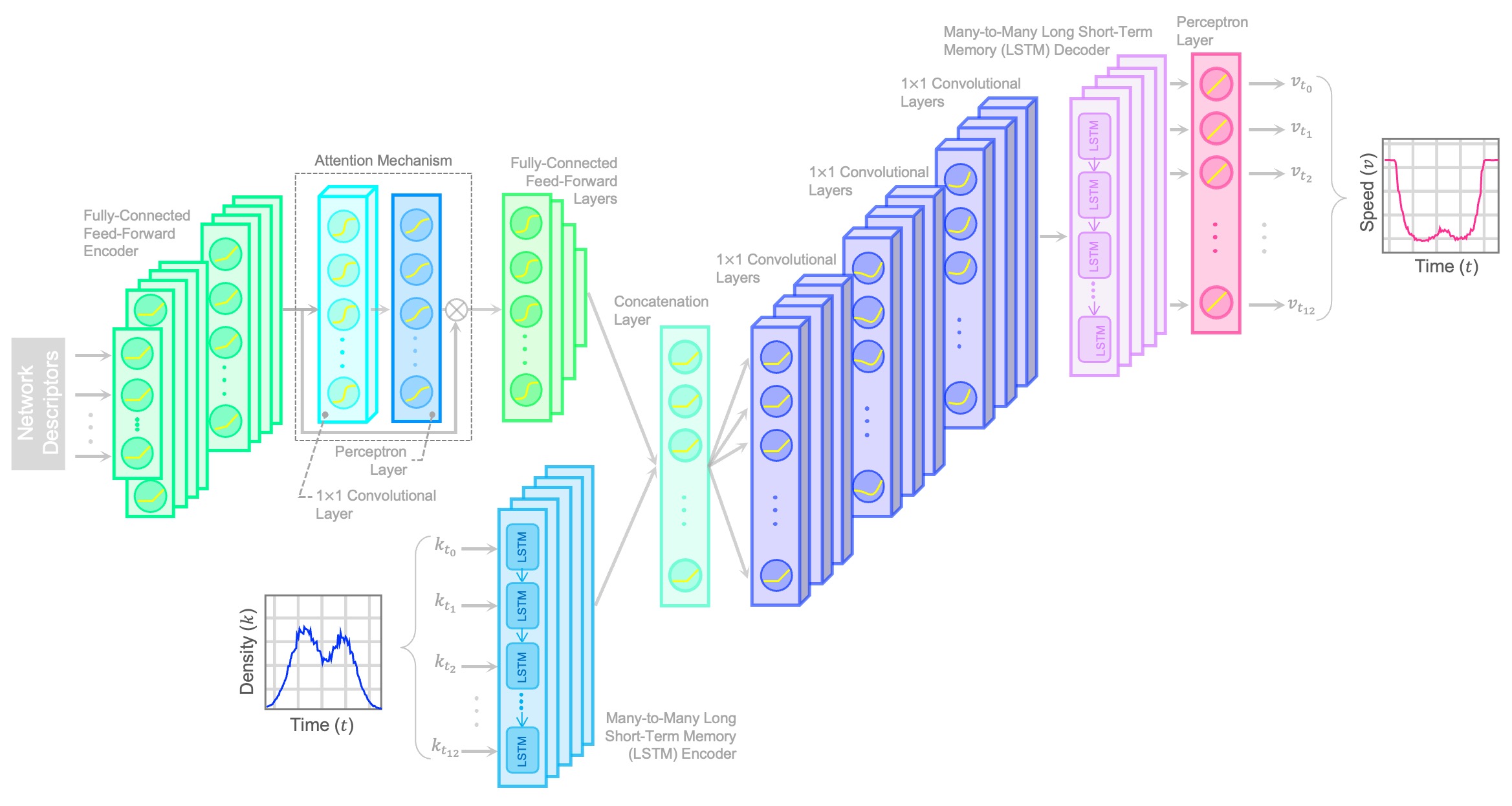
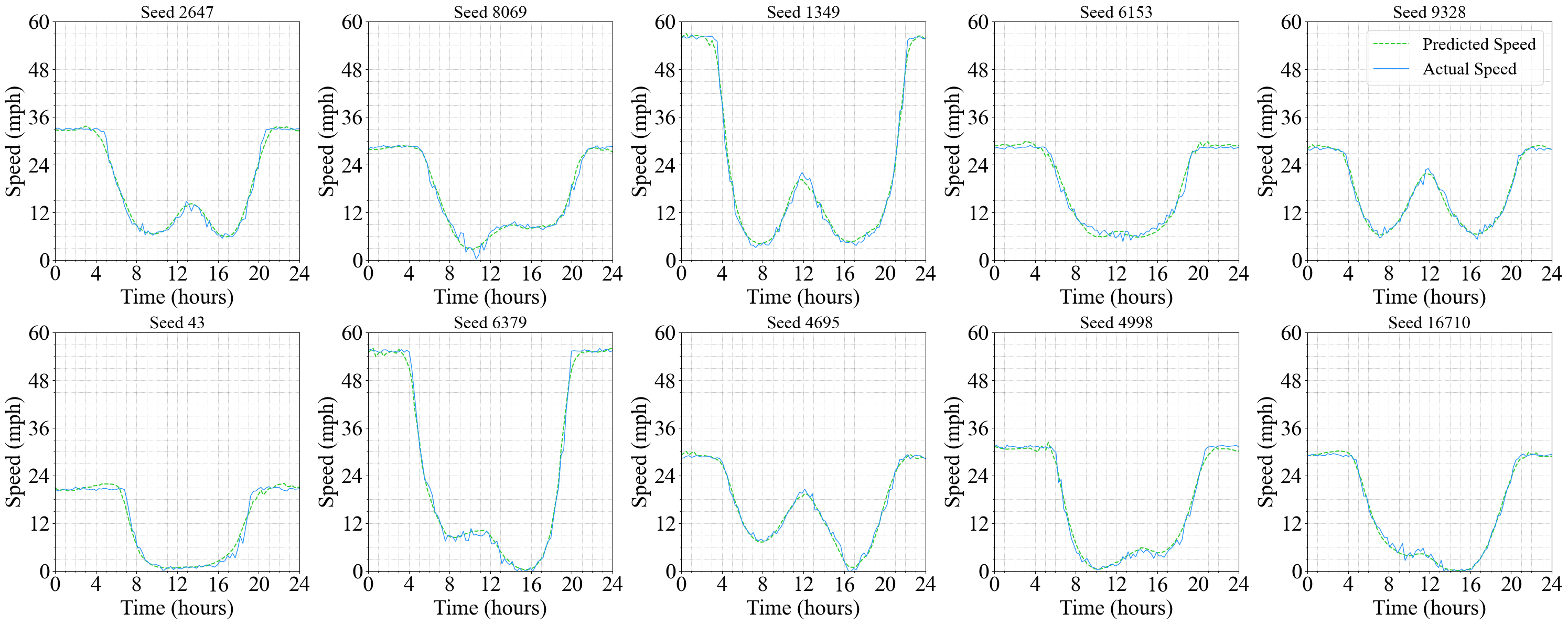
Seq2Seq Prediction of Traffic Dynamics in Urban Networks
While macroscopic models offer substantial potential for efficient and accurate traffic analysis in urban networks, their practical application is constrained by the need for calibration using traffic data from sensors, image analysis, and/or probe vehicles. On the flip side, mesoscopic and microscopic simulation models, while detailed and precise, are hindered by intensive data requirements, high computational complexity, and limited scalability, making their development and application costly and time-intensive. This research develops an alternative deep learning approach that incorporates analytical knowledge to enable dynamic traffic modeling based on macroscopic network features.
Managing Connected, Automated, and Human-Driven Vehicles on Highways
Automated driving technologies are expected to be introduced to the consumer market in the near future. Nevertheless, we may be several decades away from a homogeneous automated traffic condition because of the high price of new technologies and a relatively low willingness of users to pay for them. During the transition phase, effective traffic management strategies that aim to improve the performance of highways need to be designed for a heterogeneous demand of connected, automated, and human-driven vehicles (CAVs, AVs, and HVs). In the future, highways can potentially have three types of lanes for vehicles having different levels of automation technology: conventional lanes accessible to HVs, AVs, and CAVs, (2) high-performance lanes dedicated to AVs and CAVs, and (3) automated lanes exclusively provided to CAVs. This research aims to propose effective strategies for allocating right-of-way to vehicles with varying levels of automation and to develop pricing/taxing strategies to promote the efficiency and sustainability of the transportation system under heterogeneous traffic conditions.
Transportation Energy and Emissions Modeling and Analysis Tool
The accelerating adoption of electric vehicles (EVs) is expected to significantly reduce fuel consumption and direct tailpipe emissions in major metropolitan areas. However, the concurrent rise in electricity demand for EV battery charging, with the rapid growth in EV adoption, places additional strain on the power grid and may contribute to increased upstream emissions from electricity generation. Moreover, the lower operational and maintenance costs of EVs, combined with ongoing improvements in charging infrastructure and battery performance, gradually induce additional travel demand over time, potentially exacerbating traffic congestion within urban networks and along major highways. As traffic congestion intensifies, average vehicle speeds decline and travel times increase, which in turn elevates fuel consumption and emissions from conventional internal combustion engine vehicles. This research project aims to develop a data-driven modeling tool for predictive analysis of fuel consumption and emissions from conventional vehicles, as well as electricity consumption for EV battery charging and the resulting grid emissions, under various EV adoption trajectories, transportation planning, and energy sector infrastructure development scenarios.
Georgia Maintenance Assignment Platform
Infrastructure assessment and maintenance play a critical role in ensuring the reliability, safety, and sustainability of transportation systems. However, the optimal allocation of resources for maintenance across various locations while completing assigned tasks in minimal total time and within time and resource constraints constitutes a complex mixed-integer optimization problem, which requires the use of real-time traffic data from road networks. This research project aims to develop an interactive platform for solving the optimal maintenance assignment problem by accurately predicting travel times within the network. The Georgia Maintenance Assignment Platform (GMAP) also features an AI assistant tool that allows users to request revisions to the optimized assignment based on updated needs or constraints.
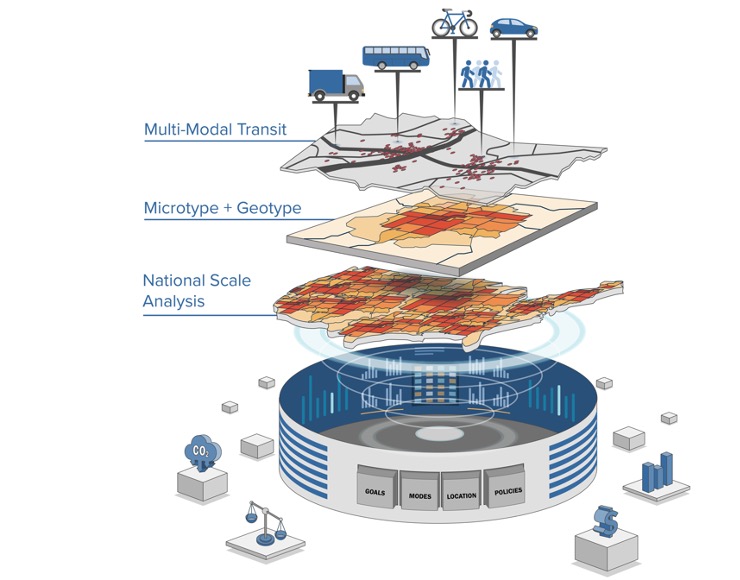
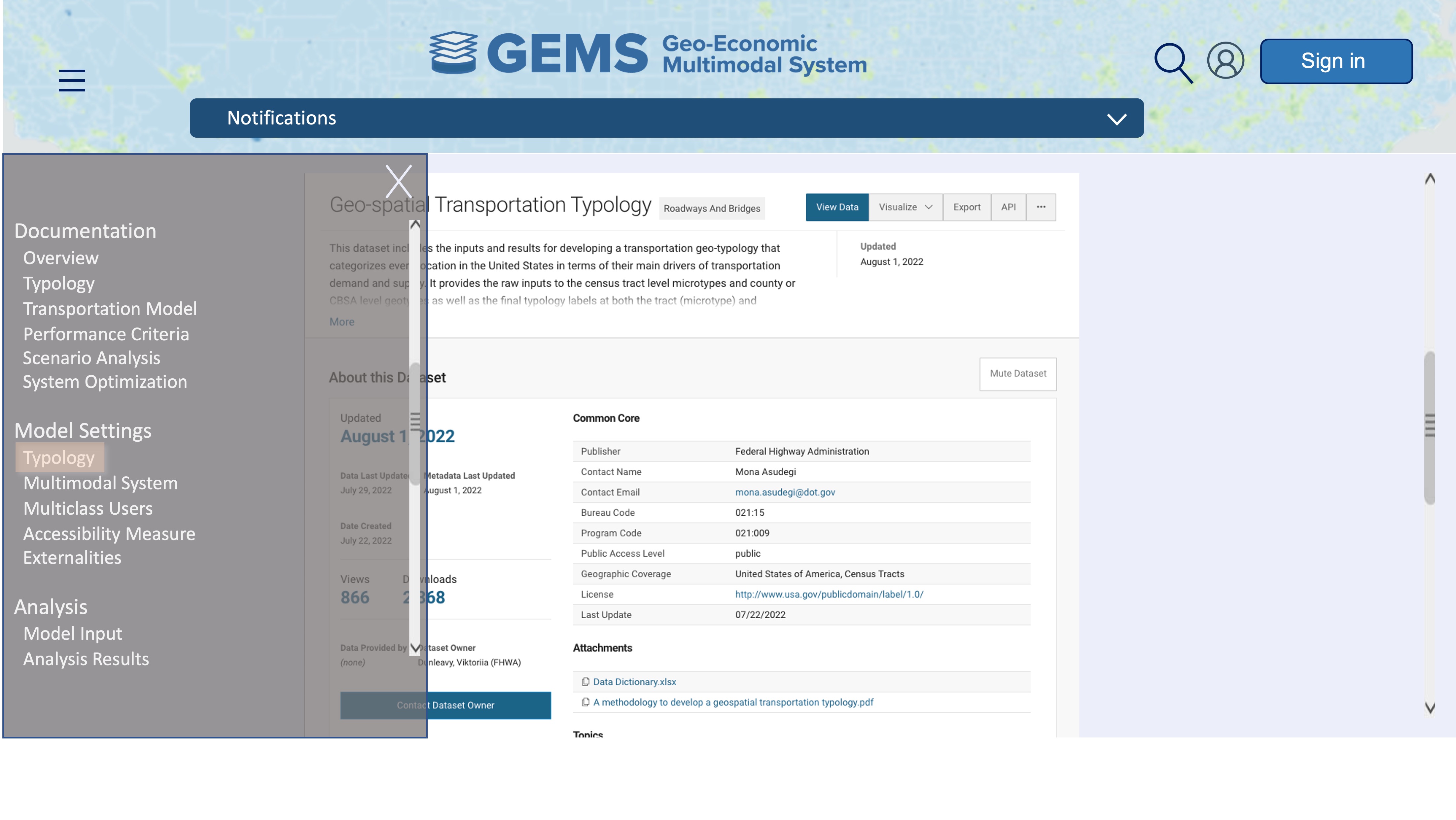
Future of Transportation Infrastructure in the United States
The Geo-economic Multimodal Systems (GEMS) model is a national-scale transportation policy analysis tool for assessing the performance of transportation systems and designing effective investment and management strategies to enhance mobility, accessibility, and equity across the country. The GEMS framework characterizes regions into location types based on curated factors and models transportation systems in various locations using a macroscopic approach to capture both temporal and spatial system dynamics, analyze policy changes, and identify the most cost-efficient solutions by accounting for differences between types of regions. GEMS is designed to determine the optimal investment strategies and system design configurations and policies that simultaneously minimize the system, user, and externality costs while maintaining equitable accessibility from a national perspective.