Projects
Cooperative Control of Human-Driven and Connected Automated Vehicles in Signal-Free Urban Networks
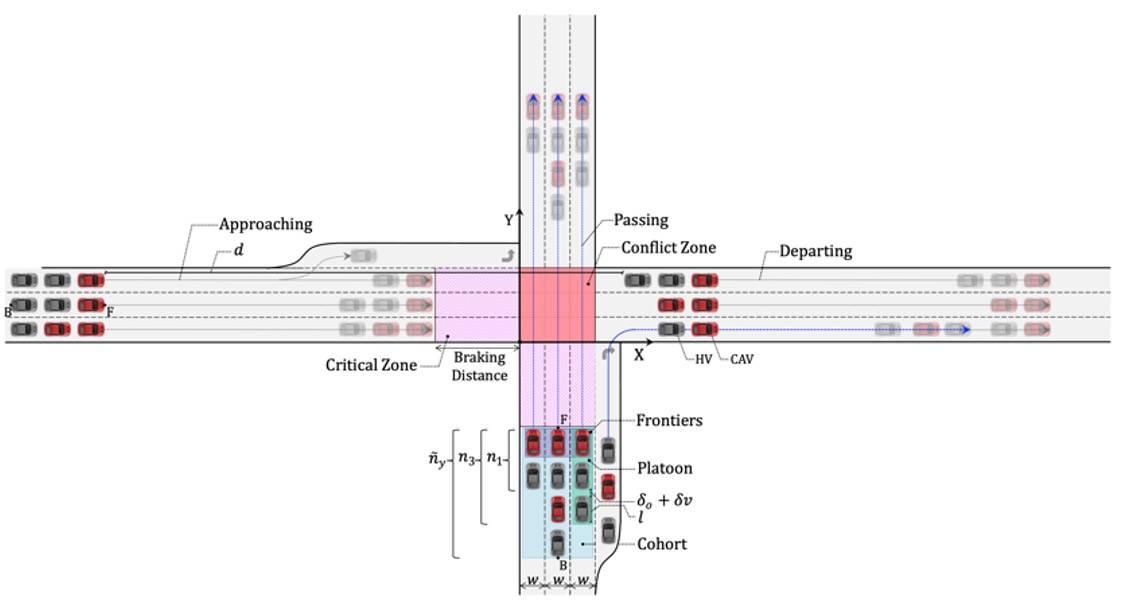
Cooperative traffic control is a progressive alternative to conventional traffic signalization in connected environments. This research exploits the untapped potential of Connected Automated Vehicles (CAVs) to regulate mixed traffic consisting of CAVs and human-driven vehicles (HVs) to enhance traffic operations in urban networks. The integration of artificial intelligence and wireless communication technologies in CAVs enables coordinating the movement of HVs approaching intersections in conflicting directions to pass through without interruption safely. This research develops a cooperative control mechanism for coordinating the movement of HV platoons led by CAVs at intersections to minimize traffic congestion, energy consumption, and the emission of air pollutants in signal-free urban networks.
Managing Connected, Automated, and Human-Driven Vehicles on Highways
Automated driving technologies are expected to be introduced to the consumer market in the near future. Nevertheless, we may be several decades away from a homogeneous automated traffic condition because of the high price of new technologies and a relatively low willingness of users to pay for them. During the transition phase, effective traffic management strategies that aim to improve the performance of highways need to be designed for a heterogeneous demand of connected, automated, and human-driven vehicles (CAVs, AVs, and HVs). In the future, highways can potentially have three types of lanes for vehicles having different levels of automation technology: conventional lanes accessible to HVs, AVs, and CAVs, (2) high-performance lanes dedicated to AVs and CAVs, and (3) automated lanes exclusively provided to CAVs. This research aims to propose effective strategies for allocating right-of-way to vehicles with different levels of automation technology and to develop pricing/taxing strategies for promoting the efficiency and sustainability of the transportation system in heterogeneous traffic conditions.
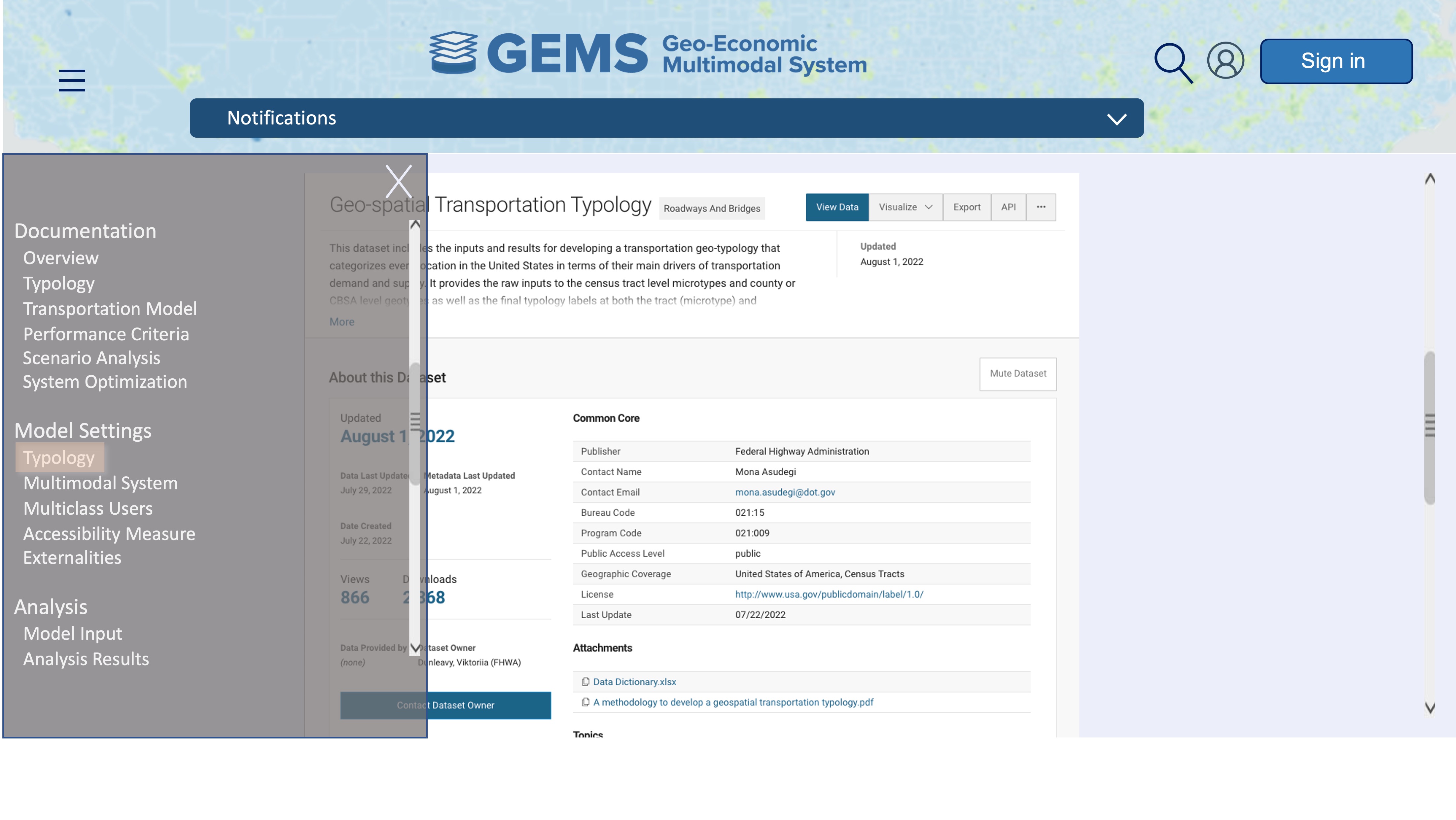
Geo-Economics Multi-Modal System: Future of Transportation Infrastructure in the United States
The Geo-economic Multimodal Systems (GEMS) model is a national-scale transportation policy analysis tool for assessing the performance of transportation systems and designing effective investment and management strategies to enhance mobility, accessibility, and equity across the country. The GEMS framework characterizes regions into location types based on curated factors and models transportation systems in various locations using a macroscopic approach to capture both temporal and spatial system dynamics, analyze policy changes, and identify the most cost-efficient solutions by accounting for differences between types of regions. GEMS is designed to determine the optimal investment strategies and system design configurations and policies that simultaneously minimize the system, user, and externality costs while maintaining equitable accessibility from a national perspective.